自己位置推定 / SLAMソリューション ユースケース
自己位置推定、SLAM技術を活用したユースケースをご紹介します。
農場:果樹園などでのユースケース
屋外で稼働する自動運転トラクターにはいくつかの課題があります。センサーの最適化やアルゴリズムの改善を行い、屋外での自動運転トラクターの安全性と効率性を向上します。
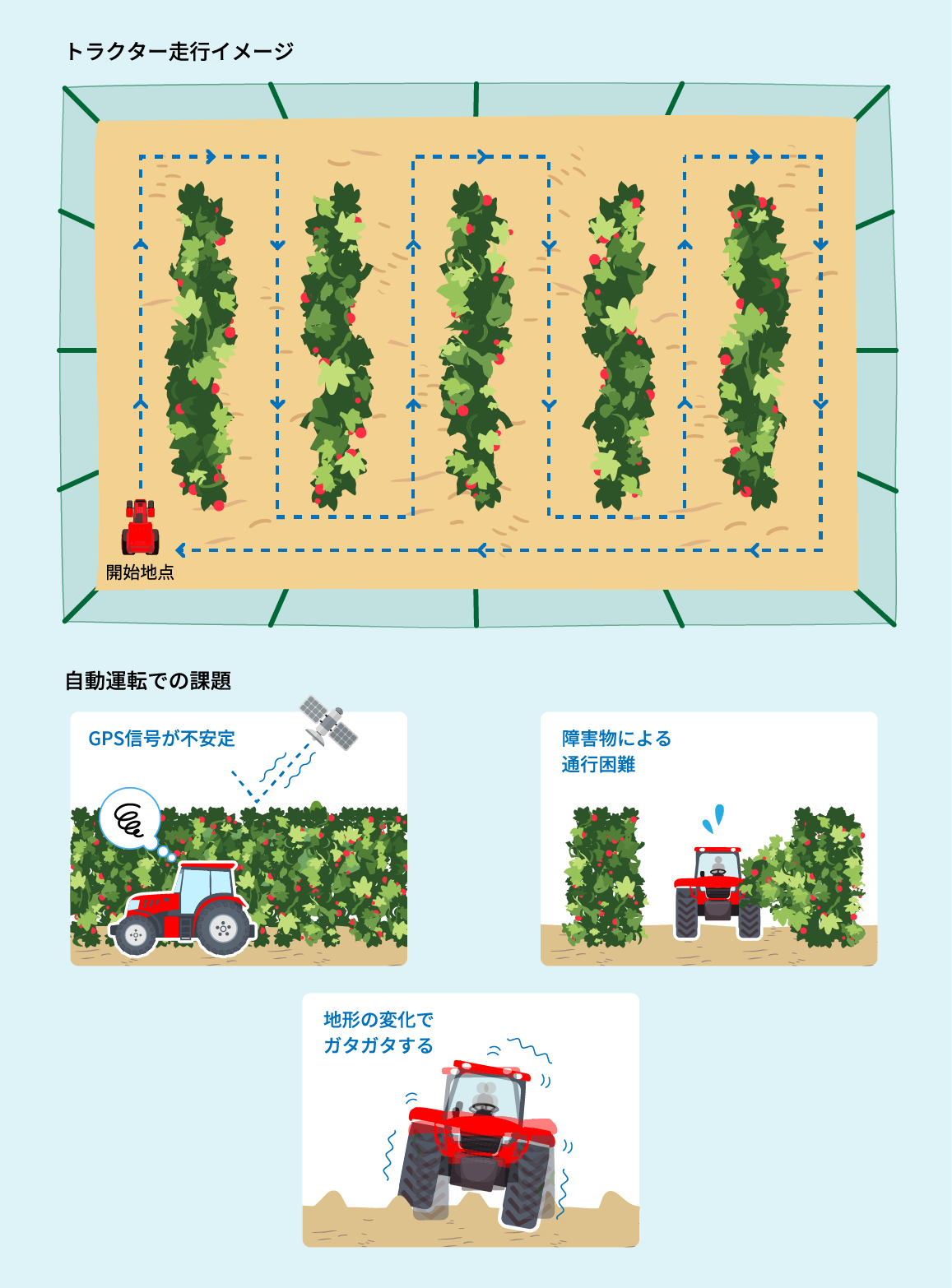
- GPS信号の不安定性への対応
-
GPS信号が屋外で不安定な場合、SLAM技術を使用してトラクターの自己位置をリアルタイムで特定します。LiDAR/センサーやカメラを組み合わせて、環境地図を作成し、位置合わせを行います。
- 障害物検出と回避
-
屋外環境では、木や岩などの障害物が存在します。SLAM技術と各種センサーを組み合わせることで障害物を回避して、ルート上を安全に走行することが可能です。
- 地形への適応
-
農場が果樹園などで自立走行するには、畝間や斜面などの地形の変化に対応する必要があります。カメラやLiDAR/センサーを組み合わせて、さまざま地形の変化に適応できます。
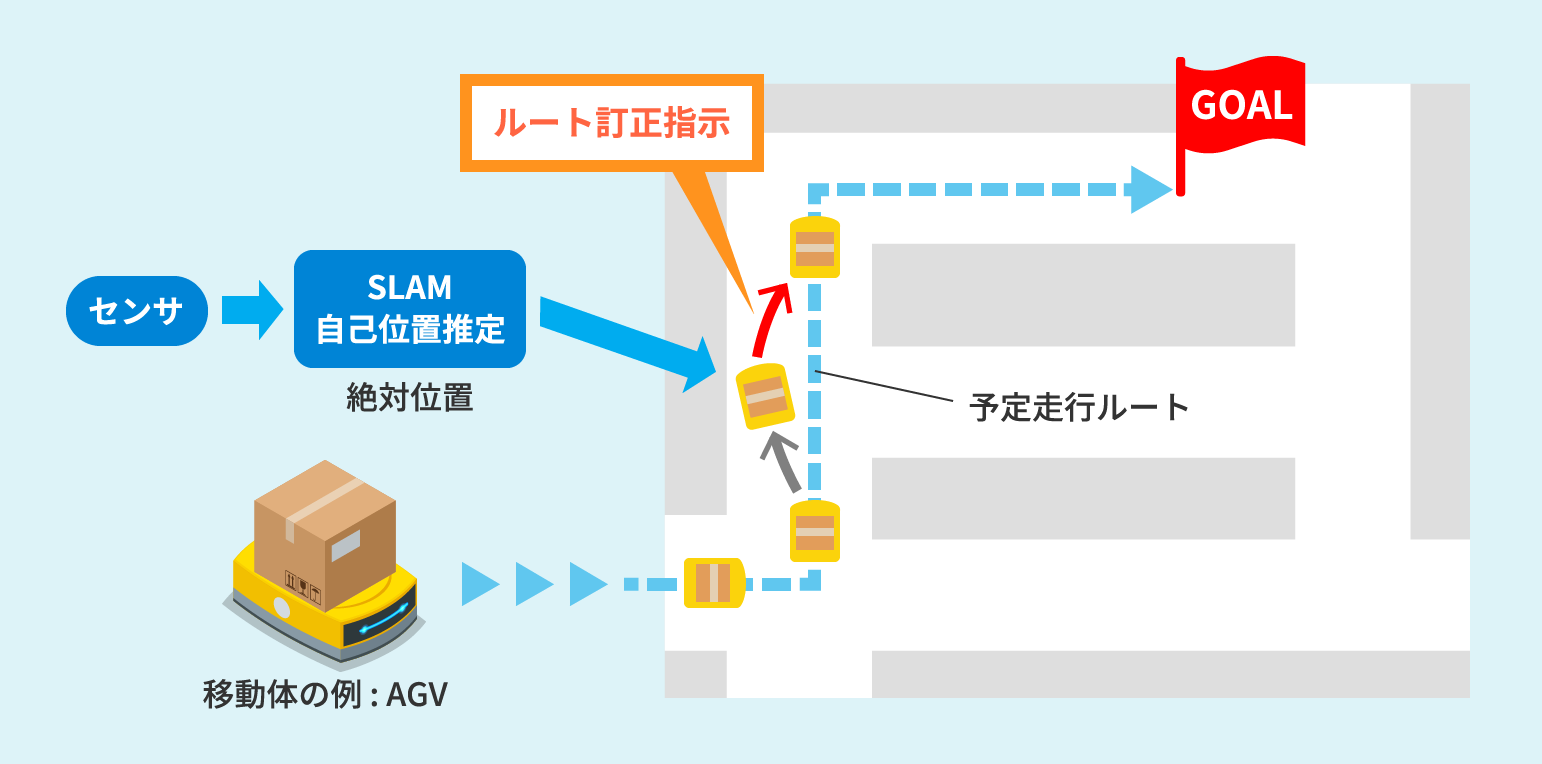
工場・倉庫などでのユースケース
工場・倉庫などで活躍する無人搬送車(AGV)でSLAMを活用することで、効率性、安全性、および自律性を向上します。
- 自己位置推定と環境地図作成
-
AGVの自己位置を推定し、同時に周囲の環境をマッピングします。これにより、AGVは正確な位置情報を把握しながら効率的に自律走行できます。
- 環境変化への適応
-
工場内や倉庫などの環境は変化します。物の移動などによる新たな障害物や、外光・照明などの環境の変化にも適応できます。
- センサーの統合
-
SLAMミドルウェアは、複数のセンサー(GNSS,カメラ、LiDAR、IMU、オドメトリなど)を組み合わせて使用できます。これにより、多様な情報を統合してロバストな位置推定と地図作成を行います。