自己位置推定 / SLAMソリューション
移動体に必要な自己位置推定ミドルウェア
AGVや自走システムでは走行ルートを決定するため、目的地および自己位置を精度高く知る必要があります。当社では、東芝独自の自己位置推定技術を顧客システム向けにカスタマイズし、リアルタイムシステムに最適化して提供いたします。
特長
リアルタイムシステム要求される、高速処理および低リソースで動作するVisual SLAMによる自己位置推定
衛星測定システム(GNSS)が使用できない環境でも自己位置推定可能な技術であるVisual RelocalizerとVisual SLAMの組み合わせによる精度向上

既存の自走システムにカスタマイズ対応可能。Intel SSE/ARM NEONやGPGPU向け最適化や将来FPGAやAIエッジデバイス対応予定

SLAMとは
SLAM(Simultaneous Localization and Mapping)は、移動体(AGVや自走システム)が移動しながら周囲の環境をマッピングし、自己位置を特定する技術です。周囲の特徴を観測し、その情報を元に自己位置を推定し、同時に環境地図を作成します。
当社では主にカメラを用いた自己位置推定技術/SLAMの開発をしています。
Landmark based SLAM - 絶対位置推定 -
ランドマークを基準に自己位置推定を行う手法です。ランドマークには、QRコードなどが利用されています。ランドマークを工場内のいくつかの場所に設置しておき、ランドマークの場所の座標と対応付けされた地図を用意しておきます。移動体は、事前作成しておいた地図と工場内で検出した複数点のQRコードの情報を照らし合わせて、自己位置推定を行います。
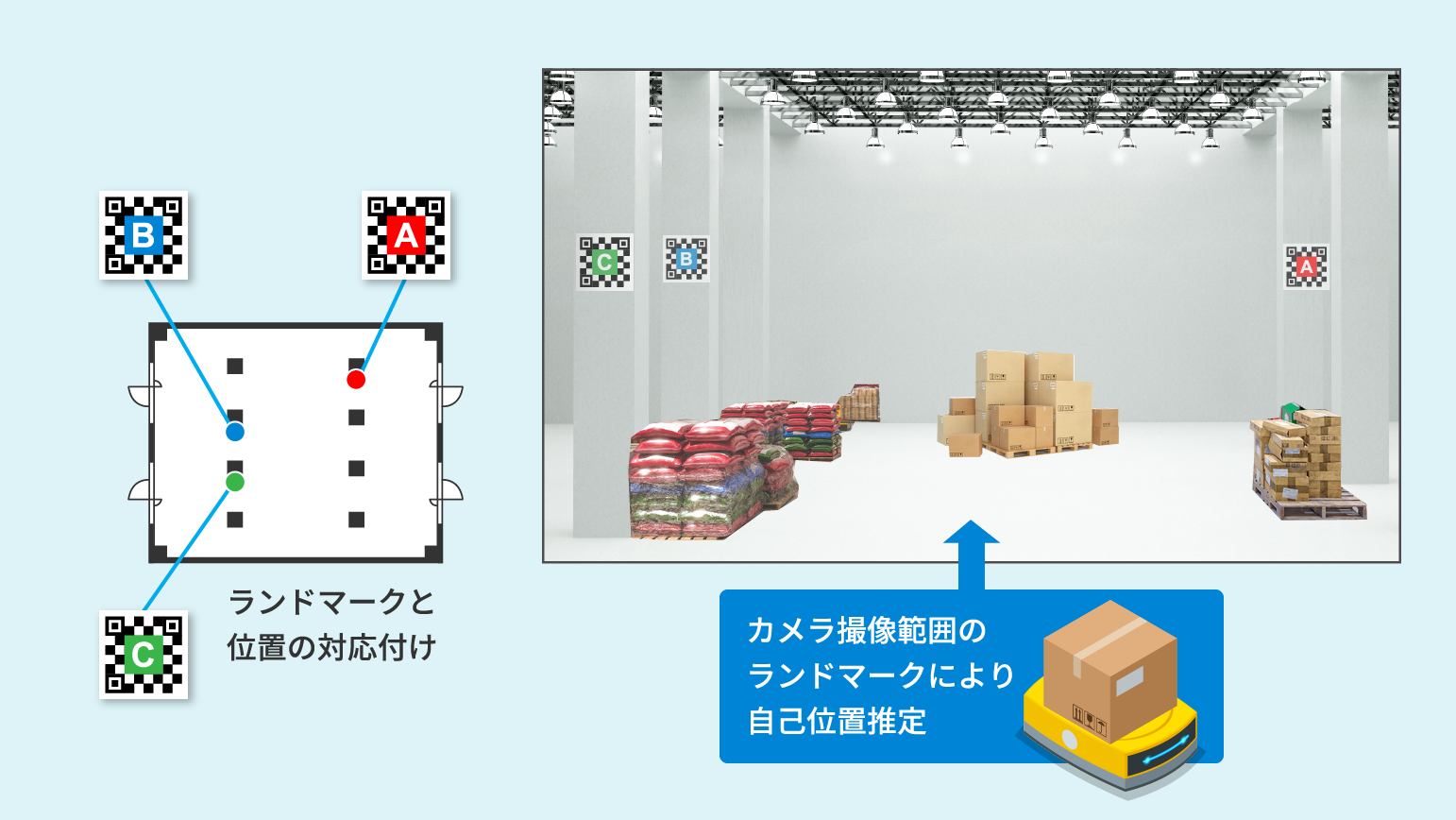

ユニークなランドマーク(QRコード等)以外にも既存の掲示物などをランドマークとして流用し、絶対位置推定に活用できます。
Visual Relocalizer - 絶対位置推定 -
風景そのものを利用して、絶対位置を推定する手法です。事前に必要な場所の景色を撮影し、それを地図データベースと対応付けて保存しておき、地図代わりとして利用します。そして、カメラで撮影した移動中の景色を地図データベースと比較し、現在位置はここであるといった推定します。
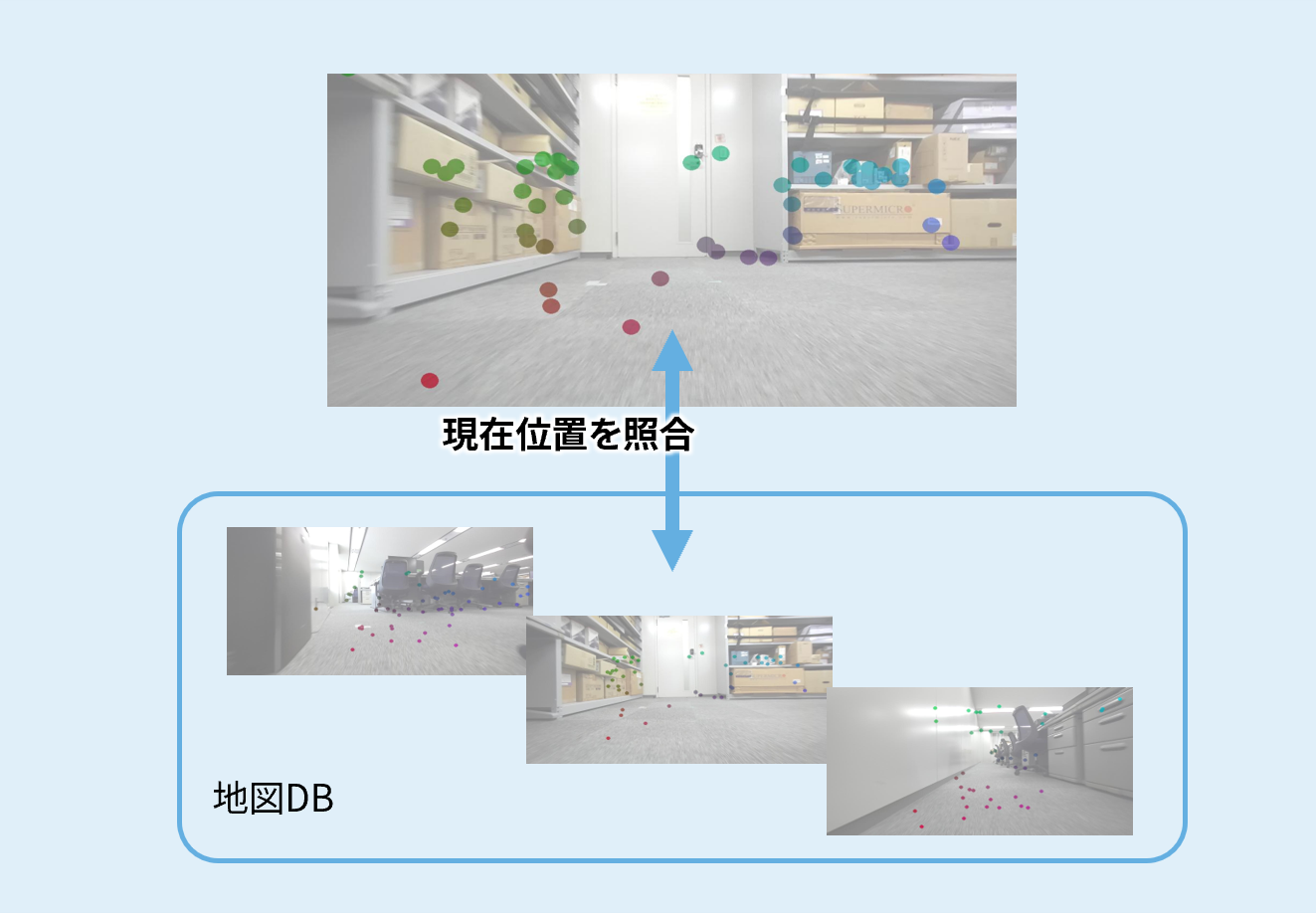
深層学習において位置推定に最適な特徴量を学習し、照明変動などの環境変化に強いロバストな対応付けを実現しています。
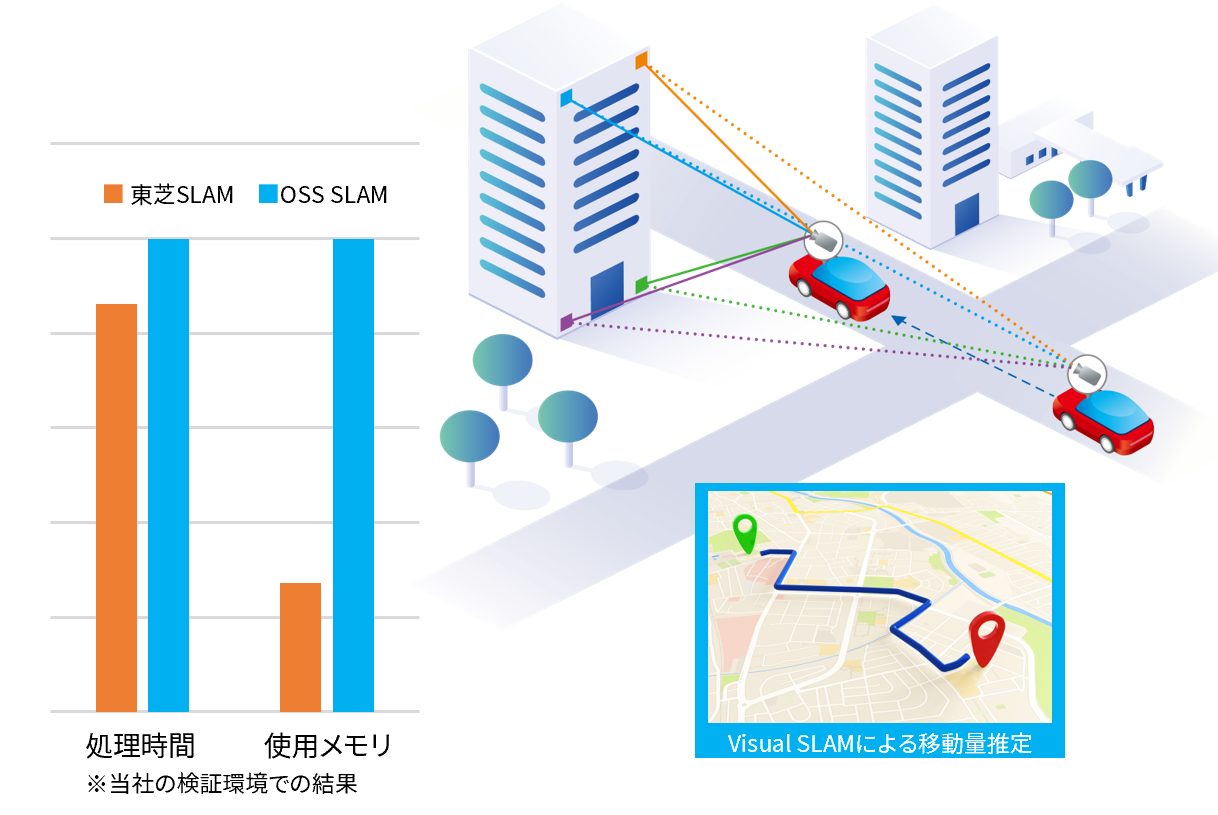
Visual SLAM - 相対位置推定 -
カメラに映った"複数"の特定の物体(特徴点)までの距離を推測し、その情報を用いて相対的な自己位置推定を行う手法です。移動体が動くと、計測しておいた特徴点までの距離が変化するので、この相違点を、複数の特徴点と比較し、物体の相対位置を推測します。
リアルタイム処理を前提としたアルゴリズムで開発されており、高速動作・低メモリでの実行を実現しています。
センサフュージョン
複数技術組み合わせにより精度向上・ロバスト性向上を取り組んでいます。
高精度な自己位置特定には次のような課題があります。
- Visual SLAM/IMUでは開始地点からの移動量の累積で自己位置推定するため、長距離移動すると誤差が大きくなる
- 一般的に精度の高い推定は処理時間がかかる
- 環境変化やノイズにより、自己位置推定に大きな誤差が含まれる
当社では、複数技術組み合わせるセンサフュージョンにより、これらセンサごとの課題を補完し、精度向上、ロバスト性向上を実現しています。
動画では、デモをまじえてご紹介します。
「自己位置推定 / SLAMソリューション」の資料請求・お問い合わせ
「自己位置推定 / SLAMソリューション」に関するご案内やお問い合わせをお受けしております。

「自己位置推定 / SLAMソリューション」 概要資料
当社が提供するSLAMソリューションの概要、センサーフュージョン、進め方やご支援範囲などをご紹介した資料です。
「自己位置推定 / SLAMソリューション」のご相談はこちらからお問い合わせください。